Conference Program IFIT 2024
Table of contents
Conference program
The conference will be held in the R rooms of the Cittadella Politecnica of the Politecnico di Torino
Conference venue (R rooms) location: https://maps.app.goo.gl/CKvZ93XyeqdMzES8A
Speakers should bring their own PC for the presentation. The rooms are provided with HDMI and VGA cables, bring an adapter if your PC has a different interface.
Presentations should last no longer than 12 minutes. A discussion of about 2 minutes will follow.
Other relevant locations are
Politecnico di Torino main entrance location: https://maps.app.goo.gl/ZgSVU1UAh87hjm277
Politecnico di Torino via Boggio entrance location: https://maps.app.goo.gl/YVX3rgUq9FFVkCxN7
General conference schedule
The detailed program is available in the next section
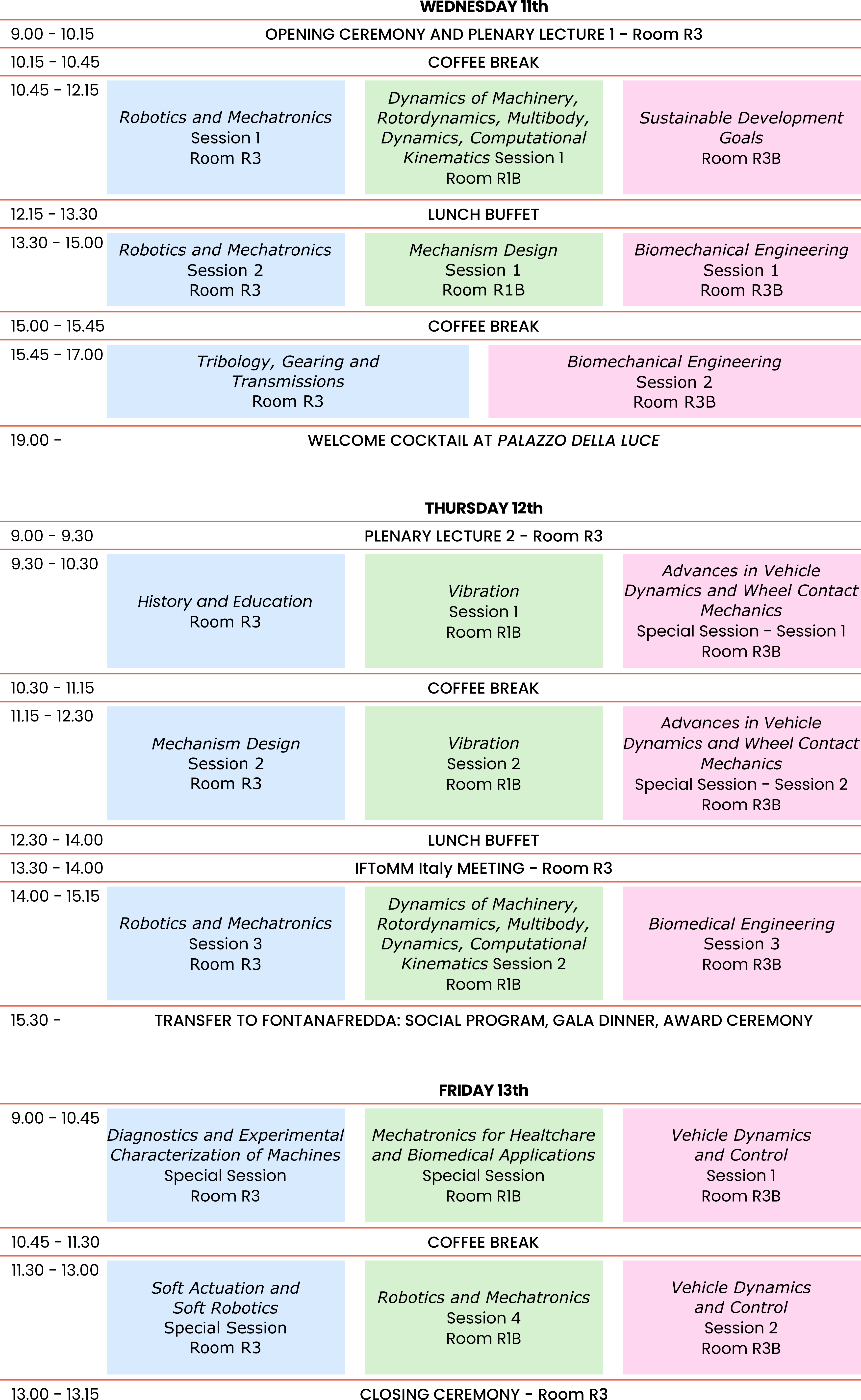
Detailed conference schedule
The detailed program can be downloaded at this LINK
Plenary lectures
Wednesday 11th
Breaking Barriers: The Rise of a New Generation of Advanced Robotics
Alessandro Piscioneri, Head of Products & Solutions Management, Comau

The growing importance of software-driven automation and applied Artificial Intelligence combined with the vast variety of automation needs in different markets and different applications are driving the creation of advanced robotic ecosystems. As more and more industries look to automate intricate and highly variable processes, they are often challenged by the growing shortage of expert workers and a widening automation skills gap. Alessandro Piscioneri, Comau’s Head of Product & Solutions Management will explore disruptive innovation in the field of advanced robotics. Starting with the upcoming trend of industrial robotics, the discussion will address concrete solutions to complex automation challenges that until now were not feasible with traditional robotics. Even more importantly, these scalable, cost-effective, and user-friendly solutions ensure accessibility and ease of implementation for companies of all sizes, without the need to employ skilled automation engineers.
Concrete examples of the topics that will be discussed include collaborative robotics, mobile manipulators, software and AI, among others. These technologies enable robotics and automation to be used in emerging markets, where automation is not yet widespread, in an effort to make robotics and automation easier to use.
Thursday 12th
Kinematic analysis and motion control of underactuated mechanisms constrained with elastic elements and their application to flexible mechanisms
Nobuyuki Iwatsuki, Professor and Vice President for Global Communication,Tokyo Institute of Technology

Generally, we cannot control underactuated mechanisms which have few actuators rather than DoF. By giving elastic constraints to underactuated mechanisms with elastic elements which store potential energy due to motion displacement of the mechanisms, the underactuated mechanisms can be controlled so that the output motion of the mechanisms is uniquely determined with respect to their actuator inputs. We can also expect flexibility of the mechanisms, which are generated by deformation of elastic elements.
A novel method for kinetostatic analysis of underactuated mechanisms constrained by elastic elements is formulated. Instead of the optimization to search mechanism configuration which takes minimum potential energy, the virtual forces are assumed and are calculated via static analysis for the assumed configuration of mechanism. By solving the system of transcendental equations representing that the assumed virtual forces should be zeros, the suitable configuration of the underactuated mechanisms constrained with elastic elements can be resultantly obtained.
Several examples of kinematic analysis and motion control of underactuated mechanisms constrained with elastic elements are then introduced in this keynote speech. For a planar network structure robot composed of linearactuators with a linear coil spring and multi-jointed links, the optimum motion control to minimize the compliance of its end effector while generating the specified motion of the end effector is examined. Nonlinear output stiffness of an end effector of a planar redundant underactuated mechanism with 6 actuators and 9 Dof is passively generated by changing configuration of the mechanism. Motion control of marionette robots as wire-driven underactuated mechanisms constrained with gravitational force is conducted.
Special sessions at IFIT 2024
The conference includes four Special Sessions, managed by Chairpersons, who proposed and promoted their topics, collected the related papers, and chair the corresponding conference sessions. This allowed enriching the conference with subjects representing the ultimate frontier of research.
We are grateful to the chairpersons who promoted the special sessions:
Alessandro Paolo Daga, Gianluca D'Elia
Diagnostics and Experimental Characterization of Machines
Cinzia Amici, Monica Tiboni, Alberto Borboni and Monica Malvezzi
Mechatronics for Healthcare and Biomedical Applications
Monica Tiboni, Giovanni Colucci
Soft Actuation and Soft Robotics
Flavio Farroni, Napolitano Guido Dell'Annunziata
Advances in Vehicle Dynamics and Wheel Contact Mechanics
Social program
Wednesday 11 at 19:00 - Welcome cocktail at Palazzo della Luce in Torino city centre

Designed in 1915 by architect Carlo Angelo Ceresa to house the new headquarters of the Cassa di Risparmio bank, the Palazzo della Luce was inspired by the monumental criteria of the late 19th century with a superb façade inspired by Juvarra and modelled on Palazzo Madama.
Palazzo della Luce was inaugurated in 1928 and housed through the years electrical and telecomunication companies like Società Idroelettrica Piemontese (SIP), Società Italiana per l'Esercizio delle Telecomunicazioni (SIPTEL), Ente italiano per le audizioni radiofoniche (EIAR), and Ente Nazionale per l'Energia Elettrica (ENEL). Italy's first public radio transmissions were broadcast from this building on 11 February 1929, when the official inauguration of 'Radio Torino' took place.
Palazzo della luce location: https://maps.app.goo.gl/jczvzqBfeMobYAHt5
You are free to reach the location as you wish. It is located in the city centre, so there are many ways to reach it from various parts of the city.
Thursday 12 at 15.30 - Transfer and Visit at Fontanafredda winery, gala dinner, and award ceremony

Founded by the first King of Italy in 1858, Fontanafredda winery produces Barolo and the great wines of the Langhe. The social event consists of a visit of the winery and a wine tasting session.
More info at https://www.fontanafredda.it/en/history/

The gala dinner and the award ceremony will be held at Antico Podere Tota Virginia in the suggestive Langhe region.
More info at https://www.totavirginia.com/en/
Note on transfer for the social events on Thursday 12th
Transfers for this day will be operated by a bus service. On the return leg, the bus will stop at Torino Porta Nuova station, Torino Porta Susa station and Politecnico di Torino.
The following map shows an approximate location of the three stops.